Cornell researchers pioneer mixed-reality system for safe drone operations
A new testing environment combines virtual simulations with real-world flights to prevent collisions in high-density airspace scenarios.
A team of researchers at Cornell University has developed a novel system designed to allow thousands of drones to operate safely in close proximity. Supported by NASA's University Student Research Challenge, the project aims to solve the scalability issues inherent in current air traffic management systems. Doctoral student Mehrnaz Sabet, who leads the team, notes that while NASA has long led efforts in drone traffic management, existing regulations rely on pre-flight coordination that becomes unmanageable as the number of aircraft surges.
The proposed solution shifts the paradigm from static planning to dynamic, car-like deconfliction. Much like drivers on a road who negotiate paths in real-time using traffic laws and infrastructure rather than coordinating with every other driver before leaving, these drones would adapt their flight paths autonomously. This approach is central to advancing advanced air mobility, with potential applications ranging from urban flying taxis to robust disaster response aircraft.
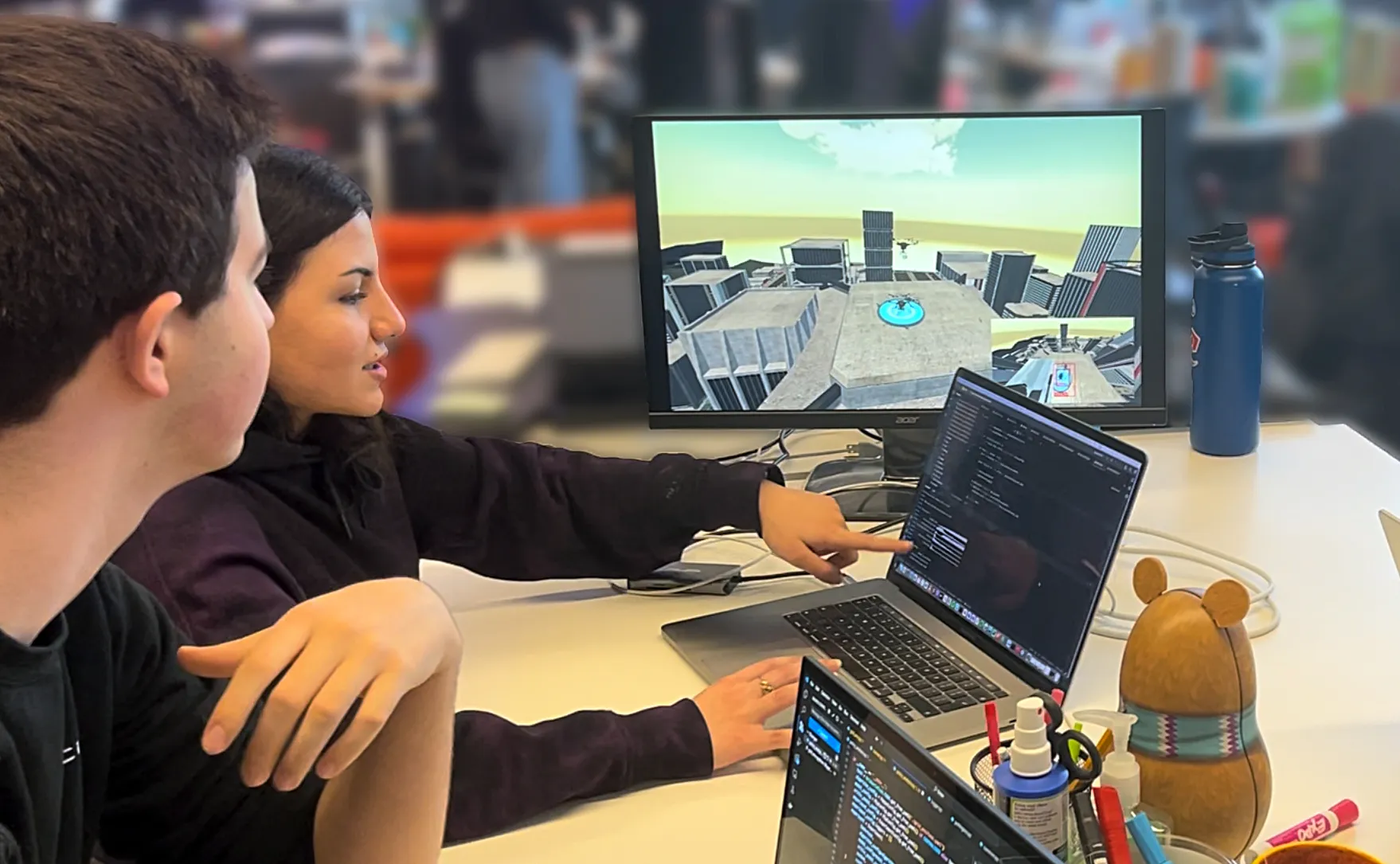
To validate this concept, the team created a mixed-reality testing environment that merges virtual simulations with actual drone flights. Recognising the physical limitations of operating large swarms in open fields, the researchers embedded a simulation engine directly into real drones. This innovation allows the aircraft to 'think' they are navigating a dense urban environment while physically flying in an open area, enabling safe testing of high-density traffic models without the need for a physical city.
The system has been stress-tested through extensive experimentation, including over 10,000 simulation runs involving more than one million trajectories. The team successfully simulated complex incidents, such as a 2025 drone collision involving a stationary crane in Arizona and wildfire response operations in California. In these scenarios, the technology demonstrated the ability to detect hazards and coordinate course corrections to prevent accidents, showcasing its potential for public safety and operational efficiency.
Industry leaders and regulators have responded positively to the findings. The Federal Aviation Administration has expressed interest in applying this mixed-reality methodology to evaluate drone operations under increasing levels of complexity. Parimal Koperdekar, acting director of NASA's Airspace Operations and Safety Program, highlighted the versatility of the team's work, which spans software, algorithms, and hardware development, noting the significance of the over 200,000 hours of experimentation conducted.
Looking ahead, the Cornell team plans to continue expanding their capabilities under the University Student Research Challenge. Their ultimate goal is to build the foundational systems required for safe, large-scale autonomy in the skies, ensuring that the rapid growth of unmanned aircraft systems can be managed safely and efficiently in the coming years.